架构原理
本书作为 Elastic Stack 指南,关注于 Elasticsearch 在日志和数据分析场景的应用,并不打算对底层的 Lucene 原理或者 Java 编程做详细的介绍,但是 Elasticsearch 层面上的一些架构设计,对我们做性能调优,故障处理,具有非常重要的影响。
所以,作为 ES 部分的起始章节,先从数据流向和分布的层面,介绍一下 ES 的工作原理,以及相关的可控项。各位读者可以跳过这节先行阅读后面的运维操作部分,但作为性能调优的基础知识,依然建议大家抽时间返回来了解。
带着问题学习
- 写入的数据是如何变成elasticsearch里可以被检索和聚合的索引内容的?
- lucene如何实现准实时索引?
- 什么是segment?
- 什么是commit?
- segment的数据来自哪里?
- segment在写入磁盘前就可以被检索,是因为利用了什么?
- elasticsearch中的refresh操作是什么?配置项是哪个?设置的命令是什么?
- refresh只是写到了文件系统缓存,那么实际写入磁盘是由什么控制呢?,如果这期间发生错误和故障,数据会不会丢失?
- 什么是translog日志?什么时候会被清空?什么是flush操作?配置项是什么?怎么配置? 10.什么是段合并?为什么要段合并?段合并线程配置项?段合并策略?怎么forcemerge(optimize)?
- routing的规则是什么样的?replica读写过程?wait_for_active_shards参数timeout参数 ?
- reroute 接口?
- 两种 自动发现方式?
segment、buffer和translog对实时性的影响
既然介绍数据流向,首先第一步就是:写入的数据是如何变成 Elasticsearch 里可以被检索和聚合的索引内容的?
以单文件的静态层面看,每个全文索引都是一个词元的倒排索引,具体涉及到全文索引的通用知识,这里不单独介绍,有兴趣的读者可以阅读《Lucene in Action》等书籍详细了解。
动态更新的 Lucene 索引
以在线动态服务的层面看,要做到实时更新条件下数据的可用和可靠,就需要在倒排索引的基础上,再做一系列更高级的处理。
其实总结一下 Lucene 的处理办法,很简单,就是一句话:新收到的数据写到新的索引文件里。
Lucene 把每次生成的倒排索引,叫做一个段(segment)。然后另外使用一个 commit 文件,记录索引内所有的 segment。而生成 segment 的数据来源,则是内存中的 buffer。也就是说,动态更新过程如下:
-
当前索引有 3 个 segment 可用。索引状态如图 2-1;
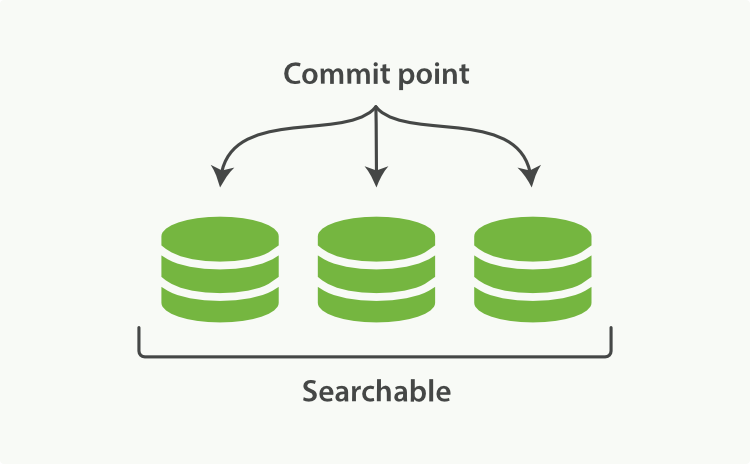 图 2-1
图 2-1 -
新接收的数据进入内存 buffer。索引状态如图 2-2;
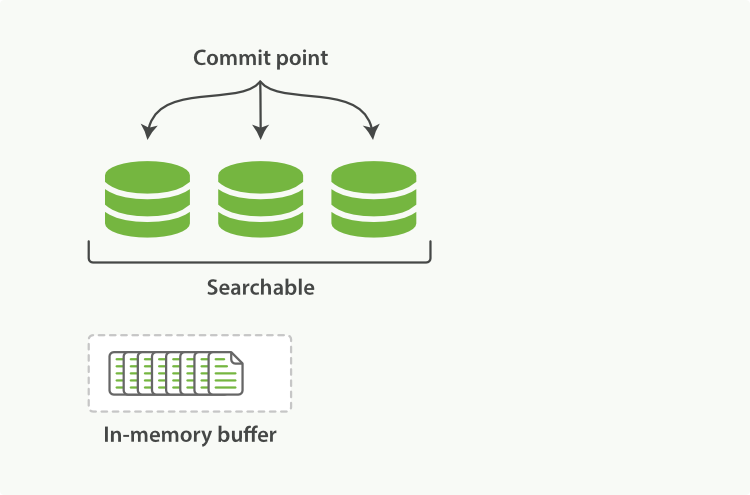 图 2-2
图 2-2 -
内存 buffer 刷到磁盘,生成一个新的 segment,commit 文件同步更新。索引状态如图 2-3。
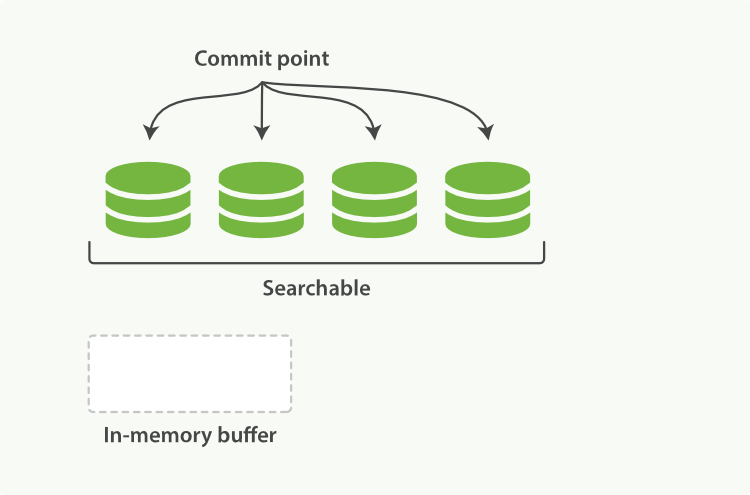 图 2-3
图 2-3
利用磁盘缓存实现的准实时检索
既然涉及到磁盘,那么一个不可避免的问题就来了:磁盘太慢了!对我们要求实时性很高的服务来说,这种处理还不够。所以,在第 3 步的处理中,还有一个中间状态:
- 内存 buffer 生成一个新的 segment,刷到文件系统缓存中,Lucene 即可检索这个新 segment。索引状态如图 2-4。
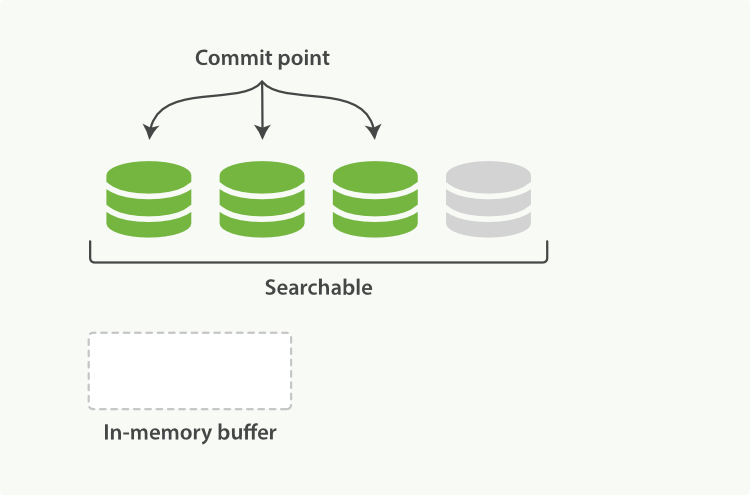 图 2-4
图 2-4 - 文件系统缓存真正同步到磁盘上,commit 文件更新。达到图 2-3 中的状态。
这一步刷到文件系统缓存的步骤,在 Elasticsearch 中,是默认设置为 1 秒间隔的,对于大多数应用来说,几乎就相当于是实时可搜索了。Elasticsearch 也提供了单独的 /_refresh 接口,用户如果对 1 秒间隔还不满意的,可以主动调用该接口来保证搜索可见。
注:5.0 中还提供了一个新的请求参数:?refresh=wait_for,可以在写入数据后不强制刷新但一直等到刷新才返回。
不过对于 Elastic Stack 的日志场景来说,恰恰相反,我们并不需要如此高的实时性,而是需要更快的写入性能。所以,一般来说,我们反而会通过 /_settings 接口或者定制 template 的方式,加大 refresh_interval 参数:
# curl -XPOST http://127.0.0.1:9200/logstash-2015.06.21/_settings -d'
{ "refresh_interval": "10s" }
'
如果是导入历史数据的场合,那甚至可以先完全关闭掉:
# curl -XPUT http://127.0.0.1:9200/logstash-2015.05.01 -d'
{
"settings" : {
"refresh_interval": "-1"
}
}'
在导入完成以后,修改回来或者手动调用一次即可:
# curl -XPOST http://127.0.0.1:9200/logstash-2015.05.01/_refresh
translog 提供的磁盘同步控制
既然 refresh 只是写到文件系统缓存,那么第 4 步写到实际磁盘又是有什么来控制的?如果这期间发生主机错误、硬件故障等异常情况,数据会不会丢失?
这里,其实有另一个机制来控制。Elasticsearch 在把数据写入到内存 buffer 的同时,其实还另外记录了一个 translog 日志。也就是说,第 2 步并不是图 2-2 的状态,而是像图 2-5 这样:
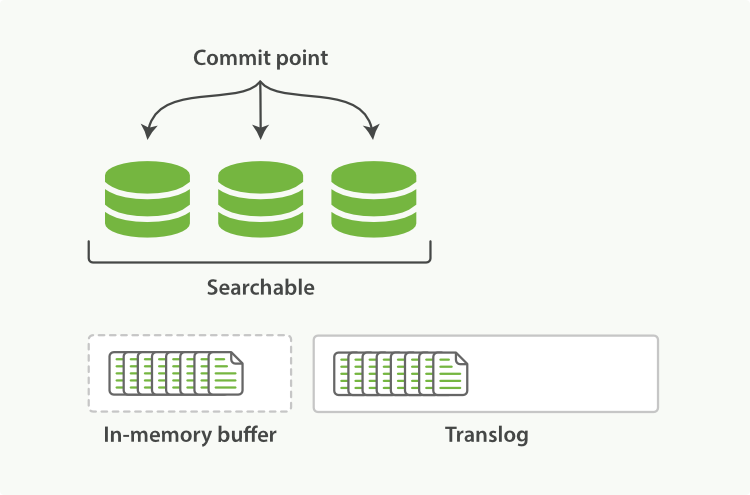 图 2-5
图 2-5
在第 3 和第 4 步,refresh 发生的时候,translog 日志文件依然保持原样,如图 2-6:
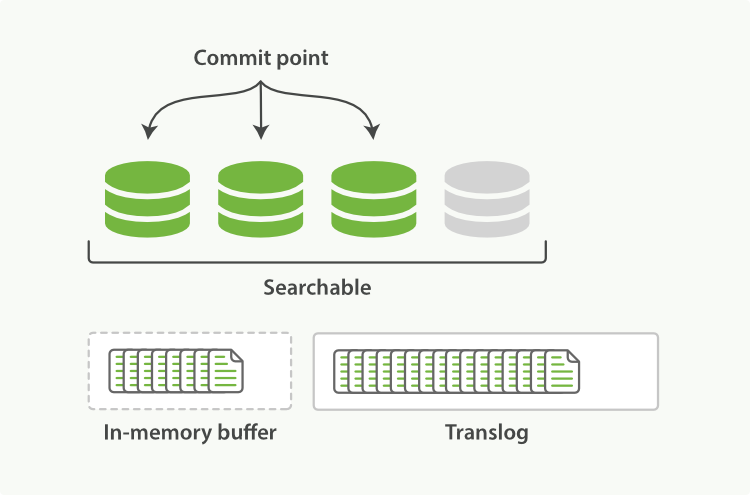 图 2-6
图 2-6
也就是说,如果在这期间发生异常,Elasticsearch 会从 commit 位置开始,恢复整个 translog 文件中的记录,保证数据一致性。
等到真正把 segment 刷到磁盘,且 commit 文件进行更新的时候, translog 文件才清空。这一步,叫做 flush。同样,Elasticsearch 也提供了 /_flush 接口。
对于 flush 操作,Elasticsearch 默认设置为:每 30 分钟主动进行一次 flush,或者当 translog 文件大小大于 512MB (老版本是 200MB)时,主动进行一次 flush。这两个行为,可以分别通过 index.translog.flush_threshold_period 和 index.translog.flush_threshold_size 参数修改。
如果对这两种控制方式都不满意,Elasticsearch 还可以通过 index.translog.flush_threshold_ops 参数,控制每收到多少条数据后 flush 一次。
translog 的一致性
索引数据的一致性通过 translog 保证。那么 translog 文件自己呢?
默认情况下,Elasticsearch 每 5 秒,或每次请求操作结束前,会强制刷新 translog 日志到磁盘上。
后者是 Elasticsearch 2.0 新加入的特性。为了保证不丢数据,每次 index、bulk、delete、update 完成的时候,一定触发刷新 translog 到磁盘上,才给请求返回 200 OK。这个改变在提高数据安全性的同时当然也降低了一点性能。
如果你不在意这点可能性,还是希望性能优先,可以在 index template 里设置如下参数:
{
"index.translog.durability": "async"
}
Elasticsearch 分布式索引
大家可能注意到了,前面一段内容,一直写的是”Lucene 索引”。这个区别在于,Elasticsearch 为了完成分布式系统,对一些名词概念作了变动。索引_成为了整个集群级别的命名,而在单个主机上的_Lucene 索引,则被命名为_分片(shard)_。至于数据是怎么识别到自己应该在哪个分片,请阅读稍后有关 routing 的章节。
segment merge对写入性能的影响
通过上节内容,我们知道了数据怎么进入 ES 并且如何才能让数据更快的被检索使用。其中用一句话概括了 Lucene 的设计思路就是”开新文件”。从另一个方面看,开新文件也会给服务器带来负载压力。因为默认每 1 秒,都会有一个新文件产生,每个文件都需要有文件句柄,内存,CPU 使用等各种资源。一天有 86400 秒,设想一下,每次请求要扫描一遍 86400 个文件,这个响应性能绝对好不了!
为了解决这个问题,ES 会不断在后台运行任务,主动将这些零散的 segment 做数据归并,尽量让索引内只保有少量的,每个都比较大的,segment 文件。这个过程是有独立的线程来进行的,并不影响新 segment 的产生。归并过程中,索引状态如图 2-7,尚未完成的较大的 segment 是被排除在检索可见范围之外的:
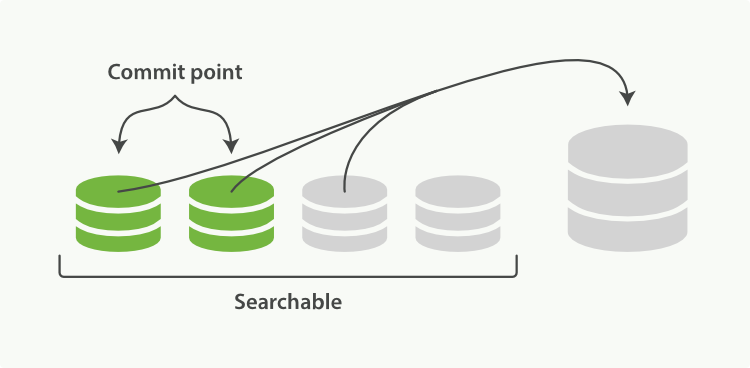 图 2-7
图 2-7
当归并完成,较大的这个 segment 刷到磁盘后,commit 文件做出相应变更,删除之前几个小 segment,改成新的大 segment。等检索请求都从小 segment 转到大 segment 上以后,删除没用的小 segment。这时候,索引里 segment 数量就下降了,状态如图 2-8 所示:
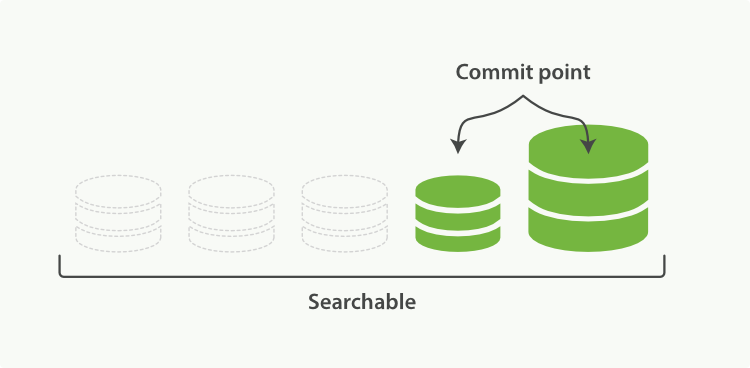 图 2-8
图 2-8
归并线程配置
segment 归并的过程,需要先读取 segment,归并计算,再写一遍 segment,最后还要保证刷到磁盘。可以说,这是一个非常消耗磁盘 IO 和 CPU 的任务。所以,ES 提供了对归并线程的限速机制,确保这个任务不会过分影响到其他任务。
在 5.0 之前,归并线程的限速配置 indices.store.throttle.max_bytes_per_sec 是 20MB。对于写入量较大,磁盘转速较高,甚至使用 SSD 盘的服务器来说,这个限速是明显过低的。对于 Elastic Stack 应用,社区广泛的建议是可以适当调大到 100MB或者更高。
# curl -XPUT http://127.0.0.1:9200/_cluster/settings -d'
{
"persistent" : {
"indices.store.throttle.max_bytes_per_sec" : "100mb"
}
}'
5.0 开始,ES 对此作了大幅度改进,使用了 Lucene 的 CMS(ConcurrentMergeScheduler) 的 auto throttle 机制,正常情况下已经不再需要手动配置 indices.store.throttle.max_bytes_per_sec 了。官方文档中都已经删除了相关介绍,不过从源码中还是可以看到,这个值目前的默认设置是 10240 MB。
归并线程的数目,ES 也是有所控制的。默认数目的计算公式是: Math.min(3, Runtime.getRuntime().availableProcessors() / 2)。即服务器 CPU 核数的一半大于 3 时,启动 3 个归并线程;否则启动跟 CPU 核数的一半相等的线程数。相信一般做 Elastic Stack 的服务器 CPU 合数都会在 6 个以上。所以一般来说就是 3 个归并线程。如果你确定自己磁盘性能跟不上,可以降低 index.merge.scheduler.max_thread_count 配置,免得 IO 情况更加恶化。
归并策略
归并线程是按照一定的运行策略来挑选 segment 进行归并的。主要有以下几条:
- index.merge.policy.floor_segment 默认 2MB,小于这个大小的 segment,优先被归并。
- index.merge.policy.max_merge_at_once 默认一次最多归并 10 个 segment
- index.merge.policy.max_merge_at_once_explicit 默认 forcemerge 时一次最多归并 30 个 segment。
- index.merge.policy.max_merged_segment 默认 5 GB,大于这个大小的 segment,不用参与归并。forcemerge 除外。
根据这段策略,其实我们也可以从另一个角度考虑如何减少 segment 归并的消耗以及提高响应的办法:加大 flush 间隔,尽量让每次新生成的 segment 本身大小就比较大。
forcemerge 接口
既然默认的最大 segment 大小是 5GB。那么一个比较庞大的数据索引,就必然会有为数不少的 segment 永远存在,这对文件句柄,内存等资源都是极大的浪费。但是由于归并任务太消耗资源,所以一般不太选择加大 index.merge.policy.max_merged_segment 配置,而是在负载较低的时间段,通过 forcemerge 接口,强制归并 segment。
# curl -XPOST http://127.0.0.1:9200/logstash-2015-06.10/_forcemerge?max_num_segments=1
由于 forcemerge 线程对资源的消耗比普通的归并线程大得多,所以,绝对不建议对还在写入数据的热索引执行这个操作。这个问题对于 Elastic Stack 来说非常好办,一般索引都是按天分割的。更合适的任务定义方式,请阅读本书稍后的 curator 章节。
routing和replica的读写过程
之前两节,完整介绍了在单个 Lucene 索引,即 ES 分片内的数据写入流程。现在彻底回到 ES 的分布式层面上来,当一个 ES 节点收到一条数据的写入请求时,它是如何确认这个数据应该存储在哪个节点的哪个分片上的?
路由计算
作为一个没有额外依赖的简单的分布式方案,ES 在这个问题上同样选择了一个非常简洁的处理方式,对任一条数据计算其对应分片的方式如下:
shard = hash(routing) % number_of_primary_shards
每个数据都有一个 routing 参数,默认情况下,就使用其 _id 值。将其 _id 值计算哈希后,对索引的主分片数取余,就是数据实际应该存储到的分片 ID。
由于取余这个计算,完全依赖于分母,所以导致 ES 索引有一个限制,索引的主分片数,不可以随意修改。因为一旦主分片数不一样,所以数据的存储位置计算结果都会发生改变,索引数据就完全不可读了。
副本一致性
作为分布式系统,数据副本可算是一个标配。ES 数据写入流程,自然也涉及到副本。在有副本配置的情况下,数据从发向 ES 节点,到接到 ES 节点响应返回,流向如下(附图 2-9):
- 客户端请求发送给 Node 1 节点,注意图中 Node 1 是 Master 节点,实际完全可以不是。
- Node 1 用数据的
_id取余计算得到应该讲数据存储到 shard 0 上。通过 cluster state 信息发现 shard 0 的主分片已经分配到了 Node 3 上。Node 1 转发请求数据给 Node 3。 - Node 3 完成请求数据的索引过程,存入主分片 0。然后并行转发数据给分配有 shard 0 的副本分片的 Node 1 和 Node 2。当收到任一节点汇报副本分片数据写入成功,Node 3 即返回给初始的接收节点 Node 1,宣布数据写入成功。Node 1 返回成功响应给客户端。
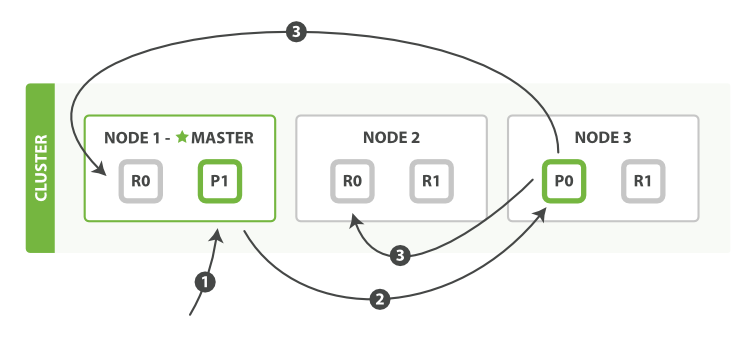 图 2-9
图 2-9
这个过程中,有几个参数可以用来控制或变更其行为:
- wait_for_active_shards
上面示例中,2 个副本分片只要有 1 个成功,就可以返回给客户端了。这点也是有配置项的。其默认值的计算来源如下:
int( (primary + number_of_replicas) / 2 ) + 1
根据需要,也可以将参数设置为 one,表示仅写完主分片就返回,等同于 async;还可以设置为 all,表示等所有副本分片都写完才能返回。
- timeout
如果集群出现异常,有些分片当前不可用,ES 默认会等待 1 分钟看分片能否恢复。可以使用
?timeout=30s参数来缩短这个等待时间。
副本配置和分片配置不一样,是可以随时调整的。有些较大的索引,甚至可以在做 forcemerge 前,先把副本全部取消掉,等 optimize 完后,再重新开启副本,节约单个 segment 的重复归并消耗。
# curl -XPUT http://127.0.0.1:9200/logstash-mweibo-2015.05.02/_settings -d '{
"index": { "number_of_replicas" : 0 }
}'
shard 的 allocate 控制
某个 shard 分配在哪个节点上,一般来说,是由 ES 自动决定的。以下几种情况会触发分配动作:
- 新索引生成
- 索引的删除
- 新增副本分片
- 节点增减引发的数据均衡
ES 提供了一系列参数详细控制这部分逻辑:
- cluster.routing.allocation.enable
该参数用来控制允许分配哪种分片。默认是
all。可选项还包括primaries和new_primaries。none则彻底拒绝分片。该参数的作用,本书稍后集群升级章节会有说明。 - cluster.routing.allocation.allow_rebalance
该参数用来控制什么时候允许数据均衡。默认是
indices_all_active,即要求所有分片都正常启动成功以后,才可以进行数据均衡操作,否则的话,在集群重启阶段,会浪费太多流量了。 - cluster.routing.allocation.cluster_concurrent_rebalance 该参数用来控制集群内同时运行的数据均衡任务个数。默认是 2 个。如果有节点增减,且集群负载压力不高的时候,可以适当加大。
- cluster.routing.allocation.node_initial_primaries_recoveries 该参数用来控制节点重启时,允许同时恢复几个主分片。默认是 4 个。如果节点是多磁盘,且 IO 压力不大,可以适当加大。
- cluster.routing.allocation.node_concurrent_recoveries 该参数用来控制节点除了主分片重启恢复以外其他情况下,允许同时运行的数据恢复任务。默认是 2 个。所以,节点重启时,可以看到主分片迅速恢复完成,副本分片的恢复却很慢。除了副本分片本身数据要通过网络复制以外,并发线程本身也减少了一半。当然,这种设置也是有道理的——主分片一定是本地恢复,副本分片却需要走网络,带宽是有限的。从 ES 1.6 开始,冷索引的副本分片可以本地恢复,这个参数也就是可以适当加大了。
- indices.recovery.concurrent_streams 该参数用来控制节点从网络复制恢复副本分片时的数据流个数。默认是 3 个。可以配合上一条配置一起加大。
- indices.recovery.max_bytes_per_sec 该参数用来控制节点恢复时的速率。默认是 40MB。显然是比较小的,建议加大。
此外,ES 还有一些其他的分片分配控制策略。比如以 tag 和 rack_id 作为区分等。一般来说,Elastic Stack 场景中使用不多。运维人员可能比较常见的策略有两种:
- 磁盘限额
为了保护节点数据安全,ES 会定时(
cluster.info.update.interval,默认 30 秒)检查一下各节点的数据目录磁盘使用情况。在达到cluster.routing.allocation.disk.watermark.low(默认 85%)的时候,新索引分片就不会再分配到这个节点上了。在达到cluster.routing.allocation.disk.watermark.high(默认 90%)的时候,就会触发该节点现存分片的数据均衡,把数据挪到其他节点上去。这两个值不但可以写百分比,还可以写具体的字节数。有些公司可能出于成本考虑,对磁盘使用率有一定的要求,需要适当抬高这个配置:
# curl -XPUT localhost:9200/_cluster/settings -d '{
"transient" : {
"cluster.routing.allocation.disk.watermark.low" : "85%",
"cluster.routing.allocation.disk.watermark.high" : "10gb",
"cluster.info.update.interval" : "1m"
}
}'
- 热索引分片不均 默认情况下,ES 集群的数据均衡策略是以各节点的分片总数(indices_all_active)作为基准的。这对于搜索服务来说无疑是均衡搜索压力提高性能的好办法。但是对于 Elastic Stack 场景,一般压力集中在新索引的数据写入方面。正常运行的时候,也没有问题。但是当集群扩容时,新加入集群的节点,分片总数远远低于其他节点。这时候如果有新索引创建,ES 的默认策略会导致新索引的所有主分片几乎全分配在这台新节点上。整个集群的写入压力,压在一个节点上,结果很可能是这个节点直接被压死,集群出现异常。 所以,对于 Elastic Stack 场景,强烈建议大家预先计算好索引的分片数后,配置好单节点分片的限额。比如,一个 5 节点的集群,索引主分片 10 个,副本 1 份。则平均下来每个节点应该有 4 个分片,那么就配置:
# curl -s -XPUT http://127.0.0.1:9200/logstash-2015.05.08/_settings -d '{
"index": { "routing.allocation.total_shards_per_node" : "5" }
}'
注意,这里配置的是 5 而不是 4。因为我们需要预防有机器故障,分片发生迁移的情况。如果写的是 4,那么分片迁移会失败。
此外,另一种方式则更加玄妙,Elasticsearch 中有一系列参数,相互影响,最终联合决定分片分配:
- cluster.routing.allocation.balance.shard 节点上分配分片的权重,默认为 0.45。数值越大越倾向于在节点层面均衡分片。
- cluster.routing.allocation.balance.index 每个索引往单个节点上分配分片的权重,默认为 0.55。数值越大越倾向于在索引层面均衡分片。
- cluster.routing.allocation.balance.threshold 大于阈值则触发均衡操作。默认为1。
Elasticsearch 中的计算方法是:
(indexBalance _ (node.numShards(index) – avgShardsPerNode(index)) + shardBalance _ (node.numShards() – avgShardsPerNode)) <=> weightthreshold
所以,也可以采取加大 cluster.routing.allocation.balance.index,甚至设置 cluster.routing.allocation.balance.shard 为 0 来尽量采用索引内的节点均衡。
reroute 接口
上面说的各种配置,都是从策略层面,控制分片分配的选择。在必要的时候,还可以通过 ES 的 reroute 接口,手动完成对分片的分配选择的控制。
reroute 接口支持五种指令:allocate_replica, allocate_stale_primary, allocate_empty_primary,move 和 cancel。常用的一般是 allocate 和 move:
allocate_*指令
因为负载过高等原因,有时候个别分片可能长期处于 UNASSIGNED 状态,我们就可以手动分配分片到指定节点上。默认情况下只允许手动分配副本分片(即使用 allocate_replica),所以如果要分配主分片,需要单独加一个 accept_data_loss 选项:
# curl -XPOST 127.0.0.1:9200/_cluster/reroute -d '{
"commands" : [ {
"allocate_stale_primary" :
{
"index" : "logstash-2015.05.27", "shard" : 61, "node" : "10.19.0.77", "accept_data_loss" : true
}
}
]
}'
注意,allocate_stale_primary 表示准备分配到的节点上可能有老版本的历史数据,运行时请提前确认一下是哪个节点上保留有这个分片的实际目录,且目录大小最大。然后手动分配到这个节点上。以此减少数据丢失。
- move 指令
因为负载过高,磁盘利用率过高,服务器下线,更换磁盘等原因,可以会需要从节点上移走部分分片:
curl -XPOST 127.0.0.1:9200/_cluster/reroute -d '{
"commands" : [ {
"move" :
{
"index" : "logstash-2015.05.22", "shard" : 0, "from_node" : "10.19.0.81", "to_node" : "10.19.0.104"
}
}
]
}'
分配失败原因
如果是自己手工 reroute 失败,Elasticsearch 返回的响应中会带上失败的原因。不过格式非常难看,一堆 YES,NO。从 5.0 版本开始,Elasticsearch 新增了一个 allocation explain 接口,专门用来解释指定分片的具体失败理由:
curl -XGET 'http://localhost:9200/_cluster/allocation/explain' -d'{
"index": "logstash-2016.10.31",
"shard": 0,
"primary": false
}'
得到的响应如下:
{
"shard" : {
"index" : "myindex",
"index_uuid" : "KnW0-zELRs6PK84l0r38ZA",
"id" : 0,
"primary" : false
},
"assigned" : false,
"shard_state_fetch_pending": false,
"unassigned_info" : {
"reason" : "INDEX_CREATED",
"at" : "2016-03-22T20:04:23.620Z"
},
"allocation_delay_ms" : 0,
"remaining_delay_ms" : 0,
"nodes" : {
"V-Spi0AyRZ6ZvKbaI3691w" : {
"node_name" : "H5dfFeA",
"node_attributes" : {
"bar" : "baz"
},
"store" : {
"shard_copy" : "NONE"
},
"final_decision" : "NO",
"final_explanation" : "the shard cannot be assigned because one or more allocation decider returns a 'NO' decision",
"weight" : 0.06666675,
"decisions" : [ {
"decider" : "filter",
"decision" : "NO",
"explanation" : "node does not match index include filters [foo:\"bar\"]"
} ]
},
"Qc6VL8c5RWaw1qXZ0Rg57g" : {
...
这会是很长一串 JSON,把集群里所有的节点都列上来,挨个解释为什么不能分配到这个节点。
节点下线
集群中个别节点出现故障预警等情况,需要下线,也是 Elasticsearch 运维工作中常见的情况。如果已经稳定运行过一段时间的集群,每个节点上都会保存有数量不少的分片。这种时候通过 reroute 接口手动转移,就显得太过麻烦了。这个时候,有另一种方式:
curl -XPUT 127.0.0.1:9200/_cluster/settings -d '{
"transient" :{
"cluster.routing.allocation.exclude._ip" : "10.0.0.1"
}
}'
Elasticsearch 集群就会自动把这个 IP 上的所有分片,都自动转移到其他节点上。等到转移完成,这个空节点就可以毫无影响的下线了。
和 _ip 类似的参数还有 _host, _name 等。此外,这类参数不单是 cluster 级别,也可以是 index 级别。下一小节就是 index 级别的用例。
冷热数据的读写分离
Elasticsearch 集群一个比较突出的问题是: 用户做一次大的查询的时候, 非常大量的读 IO 以及聚合计算导致机器 Load 升高, CPU 使用率上升, 会影响阻塞到新数据的写入, 这个过程甚至会持续几分钟。所以,可能需要仿照 MySQL 集群一样,做读写分离。
实施方案
- N 台机器做热数据的存储, 上面只放当天的数据。这 N 台热数据节点上面的 elasticsearc.yml 中配置
node.attr.tag: hot - 之前的数据放在另外的 M 台机器上。这 M 台冷数据节点中配置
node.attr.tag: stale - 模板中控制对新建索引添加 hot 标签:
{ "order" : 0, "template" : "*", "settings" : { "index.routing.allocation.include.tag" : "hot" } } - 每天计划任务更新索引的配置, 将 tag 更改为 stale, 索引会自动迁移到 M 台冷数据节点
curl -XPUT http://127.0.0.1:9200/indexname/_settings -d'
{
"index": {
"routing": {
"allocation": {
"include": {
"tag": "stale"
}
}
}
}
}'
这样,写操作集中在 N 台热数据节点上,大范围的读操作集中在 M 台冷数据节点上。避免了堵塞影响。
该方案运用的,是 Elasticsearch 中的 allocation filter 功能,详细说明见:https://www.elastic.co/guide/en/elasticsearch/reference/master/shard-allocation-filtering.html
集群自动发现
ES 是一个 P2P 类型(使用 gossip 协议)的分布式系统,除了集群状态管理以外,其他所有的请求都可以发送到集群内任意一台节点上,这个节点可以自己找到需要转发给哪些节点,并且直接跟这些节点通信。
所以,从网络架构及服务配置上来说,构建集群所需要的配置极其简单。在 Elasticsearch 2.0 之前,无阻碍的网络下,所有配置了相同 cluster.name 的节点都自动归属到一个集群中。
2.0 版本之后,基于安全的考虑,Elasticsearch 稍作了调整,避免开发环境过于随便造成的麻烦。
unicast 方式
ES 从 2.0 版本开始,默认的自动发现方式改为了单播(unicast)方式。配置里提供几台节点的地址,ES 将其视作 gossip router 角色,借以完成集群的发现。由于这只是 ES 内一个很小的功能,所以 gossip router 角色并不需要单独配置,每个 ES 节点都可以担任。所以,采用单播方式的集群,各节点都配置相同的几个节点列表作为 router 即可。
此外,考虑到节点有时候因为高负载,慢 GC 等原因可能会有偶尔没及时响应 ping 包的可能,一般建议稍微加大 Fault Detection 的超时时间。
同样基于安全考虑做的变更还有监听的主机名。现在默认只监听本地 lo 网卡上。所以正式环境上需要修改配置为监听具体的网卡。
network.host: "192.168.0.2"
discovery.zen.minimum_master_nodes: 3
discovery.zen.ping_timeout: 100s
discovery.zen.fd.ping_timeout: 100s
discovery.zen.ping.unicast.hosts: ["10.19.0.97","10.19.0.98","10.19.0.99","10.19.0.100"]
上面的配置中,两个 timeout 可能会让人有所迷惑。这里的 fd 是 fault detection 的缩写。也就是说:
- discovery.zen.ping_timeout 参数仅在加入或者选举 master 主节点的时候才起作用;
- discovery.zen.fd.ping_timeout 参数则在稳定运行的集群中,master 检测所有节点,以及节点检测 master 是否畅通时长期有用。
既然是长期有用,自然还有运行间隔和重试的配置,也可以根据实际情况调整:
discovery.zen.fd.ping_interval: 10s
discovery.zen.fd.ping_retries: 10